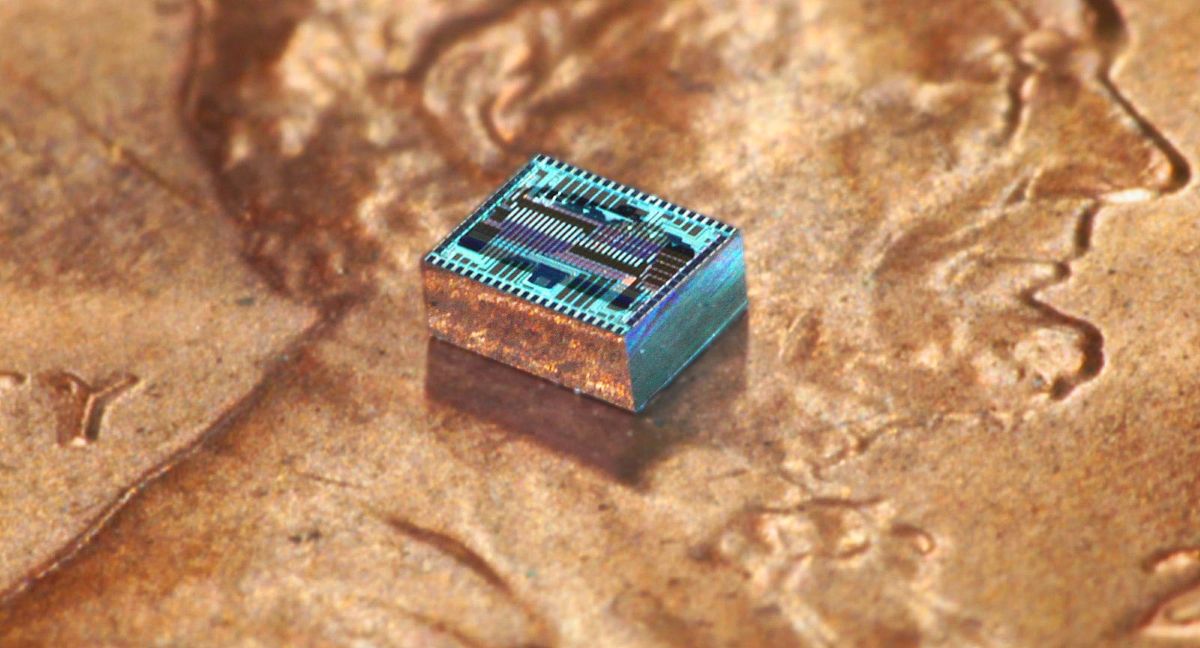
Jo aukštis – nuo 200 iki 300 mikrometrų, plotis – 50 mikrometrų; paaiškinimas ir sąnaudos.
Jungtinių Valstijų mokslininkai sukūrė mažiausią autonominį robotą ir programuojamą robotą pasaulyje. Dėl jo dydžio jo nebuvo galima pamatyti plika akimi. Jis kelis mėnesius veikė saulės energija, o jo kaina buvo mažesnė nei 0,01 dolerio už vienetą.
Šis proveržis išplėtė robotikos taikymo sritį medicinoje ir pramonės procesuose. Pensilvanijos universiteto ir Mičigano universiteto mokslininkai pristatė šią technologiją žurnaluose Science Robotics ir PNAS.
Šių mikrorobotų aukštis buvo nuo 200 iki 300 mikrometrų, o plotis – 50 mikrometrų. Mokslininkų komanda nurodė, kad sumažinimas pasiekė 10 000 kartų mažesnį mastelį nei įprasta robotikoje. Tikslas buvo atverti naują sritį programuojamoms mašinoms mikroskopinėmis dimensijomis.
Robotai veikė be laidų ar išorinių valdymo elementų. Kiekviename įrenginyje buvo integruoti jutikliai ir saulės baterijos, kurie tiekė reikiamą energiją. Įrenginiai veikė autonomiškai kelis mėnesius, o jų kaina buvo minimali.
Elektronikos miniatiūrizacija pastaraisiais dešimtmečiais sparčiai pažengė į priekį. To paties negalima pasakyti apie robotiką. Šis sektorius susidūrė su technine kliūtimi, kuri trukdė autonominiam veikimui mažesniu nei milimetro mastu. Problema išliko beveik 40 metų. Fizika tokiu mastu visiškai pasikeitė.
Gravitacija ir inercija prarado savo įtaką, o aplinką dominavo tokie veiksniai kaip pasipriešinimas ir klampumas. Esant tokioms sąlygoms, sąnarinės kojos ar rankos tapo trapios ir neveiksmingos.
Mikroskopiniu „plaukimu“ pagrįsta judėjimo sistema
Norėdami įveikti šį iššūkį, mokslininkai sukūrė kitokią varomosios jėgos formą. Kiekvienas robotas generavo elektrinį lauką, kuris stumdavo jonus artimiausiame skystyje. Šie jonai stumdavo vandens molekules ir sukūrė varomąjį srautą. Judėjimas imitavo tam tikrą plaukimo būdą, kuris buvo veiksmingas tokiu mastu.
Robotai reguliavo elektrinį lauką, kad galėtų atlikti sudėtingus judesius. Jie taip pat veikė koordinuotose grupėse, kurių judesiai buvo panašūs į žuvų būrio judesius. Greitis siekė iki vieno kūno ilgio per sekundę. Judančių dalių nebuvimas užtikrino ilgaamžiškumą ir leido kartoti manipuliacijas be pažeidimų.
Autonominės sistemos kūrimą papildė David Blaauw laboratorijos Mičigano universitete indėlis. Komanda sukūrė vienus iš mažiausių kompiuterių pasaulyje. Iššūkis buvo veikti tik su 75 nanovatais, 100 000 kartų mažiau nei sunaudoja išmanusis laikrodis.
Grandinės buvo suprojektuotos veikti labai žema įtampa ir sumažinti energijos suvartojimą daugiau nei tūkstantį kartų. Mokslininkų grupė pakeitė instrukcijų saugojimo ir vykdymo būdą. Programavimas buvo suspaustas, kad tilptų į mikroskopinę atmintį, neprarandant veikimo pajėgumo.
Robotai, kurie nustato temperatūrą ir siunčia signalus
Mikrorobotuose buvo įmontuoti jutikliai, galintys matuoti temperatūrą su maždaug 0,3 °C tikslumu. Ši funkcija leido jiems judėti į šiltesnes vietas ir atlikti terminio stebėjimo užduotis.
Duomenims perduoti komanda sukūrė sistemą, pagrįstą judėjimo sekomis. Kiekvienas robotas užkoduodavo informaciją mikroskopu su kamera atpažįstamu modeliu. Ši technika priminė būdą, kuriuo bitės perduoda informaciją judėdamos.
Kiekvienas vienetas taip pat turėjo unikalų kodą, kuris palengvino individualų programavimą naudojant šviesos impulsus. Tai leido skirtingiems robotams atlikti konkrečias funkcijas toje pačioje misijoje.
Tyrėjai paaiškino, kad ši versija yra pagrindas būsimiems patobulinimams. Robotai galėtų vykdyti sudėtingesnes programas ir integruoti papildomus jutiklius. Jie taip pat galėtų padidinti greitį ir veikti sudėtingesnėse aplinkose.
Tikimasi naujų pritaikymų medicinoje, ypač atskirų ląstelių sekimo srityje. Pramonės sektorius taip pat galėtų pasinaudoti įrankiais, galinčiais kurti ar tikrinti prietaisus mikroskopiniu mastu.



