
Prototipas gali ropinėti, plūduriuoti, plaukti, skristi ir susitraukti, kad tilptų į siauras erdves
Kiekvienais metais pristatoma keletas humanoidinių robotų prototipų. Kuo jie labiau panašūs į žmones, tuo didesnis jų poveikis. Tačiau yra ir išimčių. Pietų mokslo ir technologijų universiteto tyrėjų grupė sukūrė prietaisą, kuris atrodo kaip plūdas su ištraukiamomis kojomis (iš tiesų, tai ir yra plūdas), kurio konstrukcija gali būti naudinga teikiant pagalbą po stichinių nelaimių: robotas gali susitraukti ir ropinėti siaurose erdvėse, tada išsipūsti ir stabiliai vaikščioti. Jis taip pat gali plūduriuoti, plaukti ir skristi.
Prototipo raktas yra jo ištraukiamos kojos. Hao Liu vadovaujama komanda sukūrė konstrukcijas, kurios gali būti ištiestos 315 % į jas įpurškiant oro ir kurios, padedant servovarikliams, išlaiko stabilų žingsnį. Kiekviena koja sveria 350 gramų ir, kai yra ištiesta, gali stabiliai išlaikyti didelį svorį. Įdėjus į humanoidinį robotą, šios ištraukiamos dalys leidžia mašinai sumažinti savo aukštį 36 % ir plotį 61 %, todėl ji gali prasiskverbti per siauras erdves.
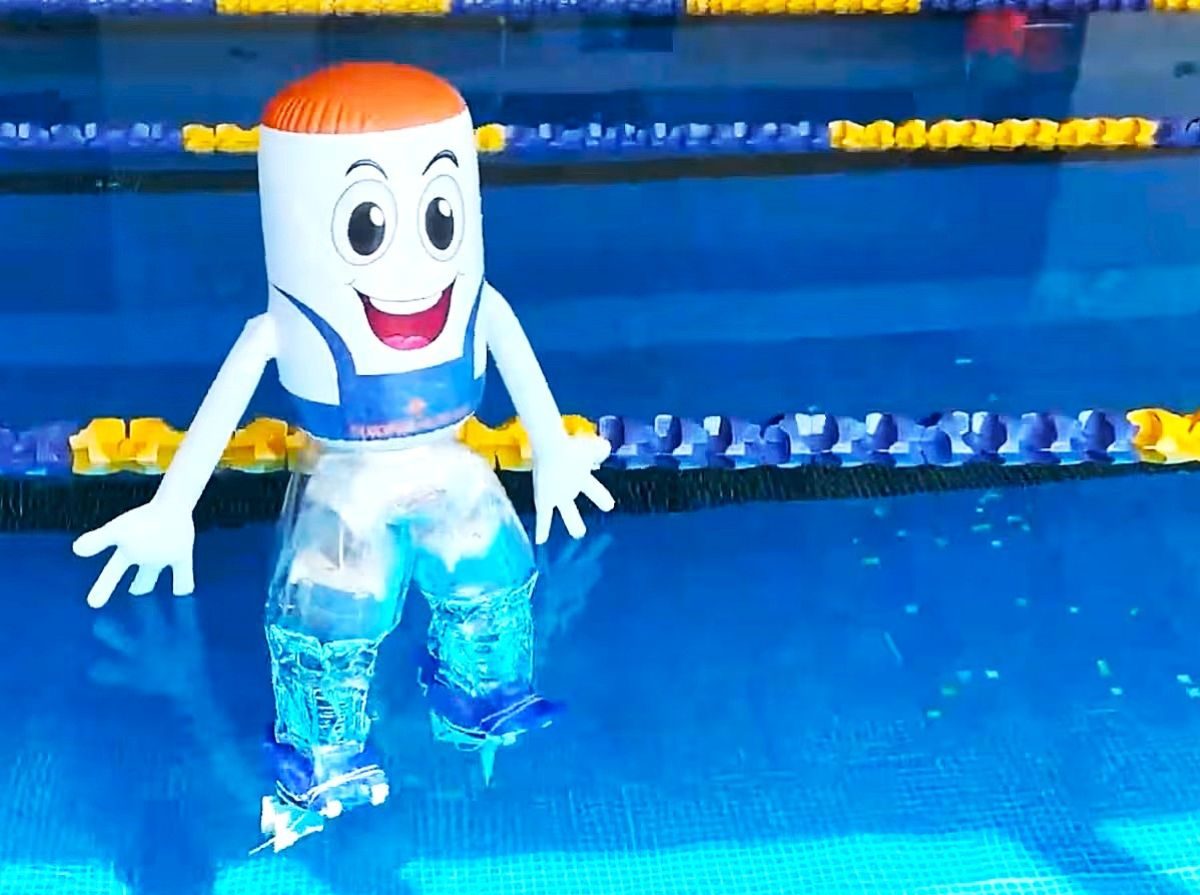
Pakėlęs kojas, prototipas turi pripučiamą lėlę (ši dalis gali būti pakeista), kuri leidžia jam plūduriuoti ir išlaikyti svorį asmens, kuris jį paima kaip gelbėjimo priemonę. Jis taip pat gali plaukti naudodamas kojas ir vaikščioti vandenyje. Ir skristi, jei pridėti keturi rotoriai, panašūs į dronų rotorius. Susitraukusioje versijoje, kai jo liemuo yra išpūstas, jis atveria kojas, kol atrodo kaip vienas vamzdis, ir ropoja kaip vikšras, todėl gali patekti į siauras erdves.
Jo kūrėjai mano, kad šis universalumas daro robotą sprendimu įvairioms situacijoms. „Jis galėtų būti naudojamas katastrofinių scenarijų atveju dėl to, kad yra pripučiamas, lengvas, prisitaikantis prie įvairių aplinkų ir saugus“, – sako tyrimo bendraautorius Ting Wang. „Mūsų prototipas gali smarkiai keisti savo aukštį ir formą, kad galėtų judėti siaurose erdvėse, kurios yra neprieinamos įprastiems robotams, o jo lengva (sveria 4,5 kg), bet tvirta konstrukcija leidžia saugiai sąveikauti su žmonėmis ir yra atspari smūgiams“, – priduria inžinierius.
Jau dešimtmečius inžinieriai stengiasi sukurti humanoidinius robotus, kurie imituotų žmogaus mechaniką. Tačiau yra keletas problemų, kurių nepavyko išspręsti: robotai, kurie auga, yra tvirti, bet lengvi ir gerai sugeria smūgius nesulūždami.
Liu ir Wang komanda sėkmingai sukūrė humanoidinį robotą, kuris gali augti, tačiau dėl to nepadidėja jo svoris. „Jis yra daugiafunkcinis, bet taip pat greitas, efektyvus ir tinkamo dydžio, kad išlaikytų pusiausvyrą stovėdamas ir judėdamas“, – rašo jie šiandien žurnale Science Advances paskelbtame tyrime, kuriame išsamiai aprašoma jo kūrimas.
Vienas didžiausių iššūkių, su kuriais jie susidūrė, buvo sugalvoti būdą, kaip suprojektuoti lengvas, bet nesideformuojančias konstrukcijas, kai jos yra išpūstos. Tuo pačiu metu jos turėjo būti pajėgios toliau eiti ar stovėti, kai susitraukia, taip pat palaikyti roboto kūną.
Norėdami įveikti šią kliūtį, jie sėmėsi įkvėpimo iš dviejų dalykų: kaulų augimo struktūros ir Baymax, pneumatinio roboto iš Disney animacinio filmo „Big Hero 6“. „Baymax parodė mums, kaip pripučiami, minkšti robotai gali būti saugūs ir draugiški, o žmogaus kaulai įkvėpė sukurti daugiafunkcinę, lengvą ir pritaikomą struktūrą“, – aiškina Wang.
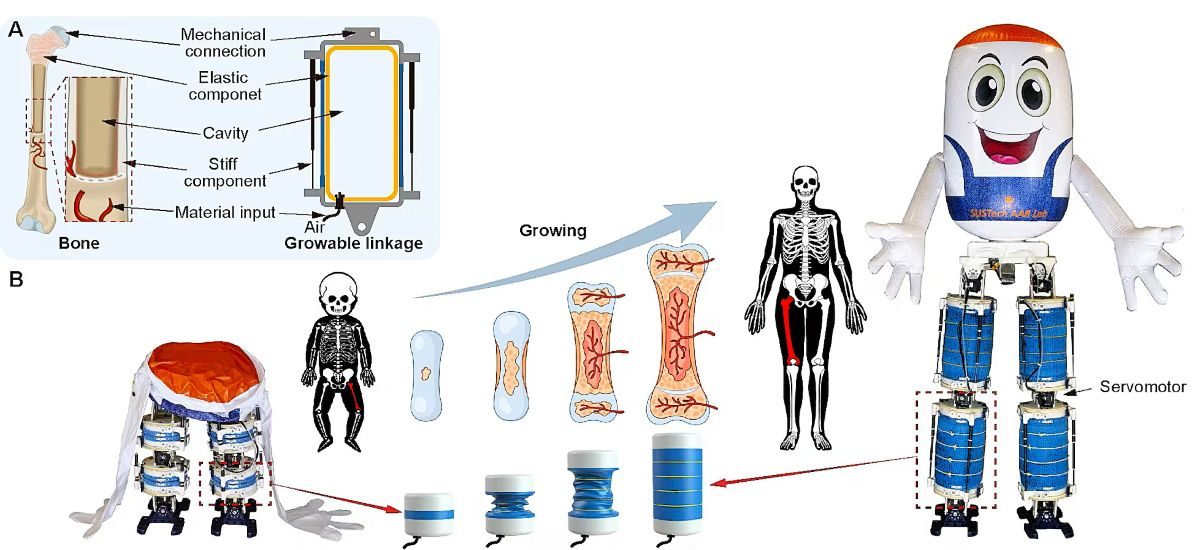
Gyvūnų kaulai auga absorbuodami arterijų tiekiamas maistines medžiagas, o šio išradimo kaulai auga gaunant orą. Juose įdiegtas mechanizmas, užtikrinantis, kad kabeliai būtų tolygiai paskirstyti po galūnes, sustiprintas PVC apvalkalu. Konstrukcija sudaro minkštus PVC sluoksnius (kurie išsipučia) ir kietus sluoksnius, kuriuose yra mechaniniai jungimai, viską dengia neelastinis audinys. Išsipūtęs svoris yra 4,5 kg, o mažas tankis leidžia jam plūduriuoti ir net skristi, jei pridedami rotoriai.
Pasak kūrėjų, šis darbas yra ne tik prototipas, bet ir pagrindas kuriant pritaikomas ir universalias humanoidines robotus, kurie prisitaiko prie nestruktūruotos aplinkos. Tai palyginti nauja tema, apie kurią dar nėra daug publikacijų. Yra keletas straipsnių apie biologiniais modeliais įkvėptus robotus (augaluose ar ląstelių procesuose). Manau, kad šis darbas yra techniškai įdomus ne tiek dėl mechaninio projektavimo metodo, kiek dėl to, kad jame sprendžiami su roboto judėjimo valdymu susiję klausimai“, – sako Valensijos politechnikos universiteto profesorius ir Sistemų inžinerijos ir automatikos katedros narys Ángel Valera, kuris nedalyvavo tyrime.
Sukūrę kojų ištiesimo ir susitraukimo sistemą, mokslininkai mato daug galimybių ją tobulinti. Tai apima autonomijos didinimą ir galingesnių servovariklių įdiegimą, siekiant pagerinti jos veikimą. Didelės kalbos modeliai taip pat gali būti naudojami prietaiso mokymosi algoritmams tobulinti. „Mūsų projektas numato humanoidinių robotų naudojimą įvairiose sudėtingose, dinamiškose ar pavojingose aplinkose, kur jie gali saugiai ir efektyviai atlikti pasikartojančias ar rizikingas užduotis kartu su žmonėmis, galiausiai prisidėdami prie saugos, produktyvumo ir gyvenimo kokybės gerinimo“, – rašo autoriai.



